
출원번호 : 1020220120250 (2022.09.22)
등록번호 :
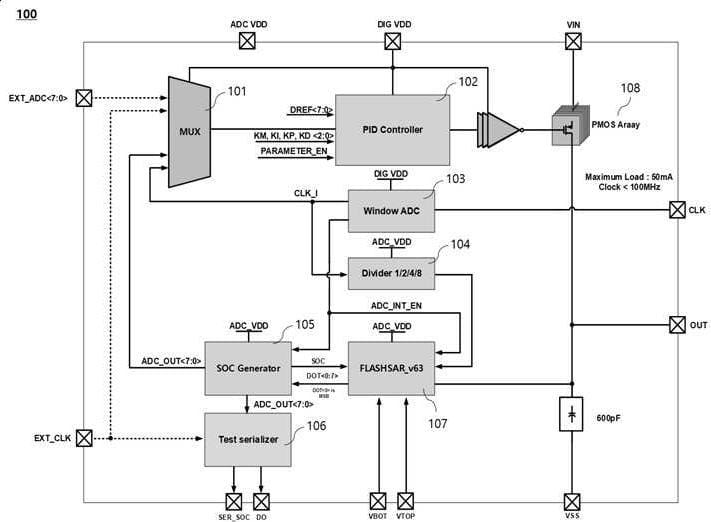
요약 : 본 발명의 일 실시예에 따른 DLDO(Digital Low Dropout Regulator)의 동작 방법에 있어서, 복수의 PMOS가 포함된 PMOS Array가 출력 전압을 추출하고, 추출한 전압을 Window ADC로 전달하는 단계; 상기 Window ADC가 전달된 전압이 기설정된 전압 범위에 포함되는지 판단하고, 판단 결과에 기초하여 클락 신호를 발생시키고, 상기 전압을 PID(Proportional Integral Derivative control) Controller로 전달하는 단계; 상기 PID Controller는 상기 전압 및 목표 전압을 기설정된 Fuzzy Logic에 입력하여 최적의 PID Gain 값을 산출하는 단계; 상기 PID controller는 상기 산출한 최적의 PID Gain 값을 PID 연산에 적용하여 Correct 수치를 산출하는 단계; 및 상기 PID controller는 상기 Correct 수치를 상기 PMOS Array로 전송하여 상기 PMOS Array로부터 출력되는 전압을 조절하는 단계; 를 포함할 수 있다.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}